|
|
“Star Tracking のAnchor モードが正しく動作しない” バグを修正しました。 |
|
Feb.4 2007 |
重星でない通常の星についてDiffraction
fitting機能を用いると、現象時刻のオフセット時間が正常に表示されない不具合を修正しました。 |
|
Jan.15
2007 |
ApertureのXY座標をCSVに記録できない(Ver.0.9.25)不具合を修正しました。 |
|
Dec.24
2006 |
Diffraction
Fittingのコードを改良し、精度を向上させました。 |
|
Nov.23
2006 |
Fit to Diffraction Curve 機能で、Lunar Distance の値が200万kmを超えるとエラーとなる不具合を修正しました。 |
|
Nov.21
2006 |
(1)Field
Measureモードでグラフをクリックしたとき、グラフ上の点とは異なる画像が表示されてしまう不具合を修正しました。 |
|
Nov.19
2006 |
CSVファイル読み込みに関する不具合を修正しました。 |
|
Nov.12
2006 |
グラフ表示に関する不具合を修正しました。 |
ダウンロード
Limovie
0.9.25d
![]()
Limovieの新バージョンVer.0.9.25dです。Ver.0.9.25について、新機能も含め、いくつかの改良をおこないました。
このバージョンは、論文
「ビデオ画像用光量測定ソフトウエアLimovieの開発と星食観測への応用」 宮下,早水,相馬 国立天文台報 9 2-28 (2006)
にまとめた内容を、ソフトウエアとして利用できるようにしたものです。
論文は、国立天文台のWebページで閲覧できます。
国立天文台のWebページ(図書室) の一番下です。
PDFファイルダウンロードのための直接リンクです
1.グラフ表示機能
2.回折シミュレーションとのフィッティング機能
3.CSVファイル読み込み機能
など、Limovieをより有効に観測や解析に活かすための様々な新機能を持っています。
また、次の新機能をはじめ、IOTAの方々の様々な提案や試みにより、大幅な機能拡大をおこなうことができました。
4.複数の対象の同時測定機能
は、Tony
George さん(USA)
が、操作性も含めて提案してくださったものです。
5.AVIファイル読み込みの制限を取り除く、AVISynth
への対応がなされました。
これは、小惑星の予報で有名なSteve
Prestonさんが見つけてくださった方法です。
Windows
Movie Maker を使ってキャプチャしたAVIファイルを、直接Limovieから読むことができます。
6.ガンマ逆補正機能
(Gamma
Reverse Correction)
ガンマ補正されたビデオ画像を、「元に戻す」機能です。光量測定を正確に行うための機能ですが、ガンマ補正により持ち上げられたノイズを低減させることもできます。
7.二重星の回折についての解析機能
接近した二重星は、回折光が重なって現象時刻が分かりにくくなります。そのような場合についても正確に時刻を解析するとともに、重星の位置関係についての情報が得られるようにしました。
新機能
《Ver.0.9.25cの新機能》
6.ガンマ逆補正機能 (Gamma Reverse Correction)
星食観測によく用いられるWAT100Nには、ガンマ補正機能があります。これらの高感度カメラは夜間の監視用として用いられることが多く、影になって照明が当たらない部分なども見やすくする機能が必要とされます。天文用、特に星食観測では、対象星が暗い場合などに、確認のために必要となります。しかし、光量を測定して回折の影響を調べたり等級を推定したりするときなどには、それらの測定が正確にできない原因となってしまいます。そこで、カメラが与えたのと逆の補正をおこなえば、CCDでつくられた元の画像が再現できることになります。幸い、ガンマ補正は指数または対数で表される単純な形の補正ですので、Limovieがファイルから読み込んだ画像に対して処理を行いながら表示させることにしました。これにより、ファイルはそのままで、表示と測定を処理後の画像で行うことができます。
以下のように操作すると、機能が実感しやすいと思います。
(1) ノイズの多い画像を選んで読み込みます。
(2) 3Dグラフで星像を表示します。
(3) ガンマ逆補正機能にチェックをして、
(4)
0.45(WAT100NのHiの値)にします。
画像再生や光量測定も、ガンマ"逆"補正したまま可能です。
7.重星の回折解析機能
重星の回折パターンを計算し、観測値と比較することにより、現象の時間差と接地角を推定する機能です。
(1) 小惑星・月までの距離を入力します。
(2) 影の移動速度(小惑星・月の方向に垂直な面内の)を入力します。
(3) 後から潜入した星、または先に出現した星について、全体の光量に対するその星の光量の比を百分率で入力します。
(4) 推定される現象の時間差をミリ秒単位で入力します。
(5) Double star analyzing にチェックをし、Fit to Diffraction Pattern ボタンをクリックします。
(6) (3)と(4)についていくつかの値を入力してフィッティングをおこない、Least Squaresが最も小さくなる場合を探します。
(7) 重星のふたつのコンポーネントの時間が、赤く選択されたフレームに対するオフセット値としてミリ秒単位で表示されますので、それから現象時刻を求めてください。
《Ver.0.9.25の新機能》
1.グラフ表示機能
機能と操作性の簡素化を図るために、これまでグラフ機能をつけていませんでした。
しかし、正確な時刻の解析を第一の目的とするソフトウエアとしては、測定のたびに表計算ソフトを起動しなければならないのは不便です。測定を簡単で迅速に行えるようなグラフ機能を工夫してみました。
グラフ機能の使い方
(1)
測定をする (
Measurement Start → Stop)
(2) Graph ボタンをクリック
光量変化の折れ線グラフが現れます。
*
横軸のスケールを変える → Scale
アップダウンボタンをクリック
測定時間が長く、通常の横軸スケールでは全体を表示できない場合は、Entireモードとなり、自動的に全体が表示されます。
このままでは横軸のスケールを変えることができませんので、WidthラジオボタンをPartにしてください。
*
縦軸のスケールを変える → Y
Axis にあるアップダウンボタンをクリック
*
ラインの有無 → Line
のチェックボタンをクリック
*
点の大きさを変える。 → Radius
アップダウンボタンをクリック
(3) 光量が25%と考えられるグラフ上の点をクリック
点の色が赤く変わり、選択されたことを示します。
このとき、Show
Image at Checked Point がチェックされていると、画像表示領域には、該当フレームが表示されます。
(4) Narrow ボタンを押す。
フレーム画像が見やすくなったはずです。
ここで、Field
Show機能を使って、フレーム中央時刻を調べます。
フレーム中央時刻は、TIViの場合、Field
Showにより分離された数字のうち、「遅い方の数字」です。
GHS時計+TIVi+WAT100N で調べてみましたが、この数値GHSのLED信号に対し、1ミリ秒あるいはそれ以下の違いしかなく、たいへん高精度であるという結果が出ています。
*
参考 国立天文台報 9
2-28 (2006) p12 図11,図12
因みに、インポーザKIWI
OSDについても同様の結果が得られたことが下記に紹介されています。
A
detailed look at KIWI OSD video timestamps
(5) 報告は...
ILOCフォーマットでは、増減光の開始と終了の時刻を報告するようになっています。読み取った時刻をそのまま報告することができます。
なお、グレージングの場合には、増光開始または減光終了を特定するのが少し難しいかも知れません。
(6)
クリップボードにコピーできます
#
表示したグラフを、レポートやWEBづくり等に簡単に利用することができます。
2.より正確な時刻を (回折のシミュレーションとの比較)
恒星が点光源だと考えられる場合には25%の光量になったときが幾何学的現象中央時刻 (恒星と月縁と観測者が一直線上になった状態) です。
グレージングなどでゆっくりした光量変化がとらえられた場合、光量25%のフレームを特定することが課題となります。
そこで、計算により求められた回折の影響(シミュレーション)と、実際の光量変化を比較し、現象中央時刻を推定する機能を用意しました。
回折シミュレーションについての詳細は、
[参考] 国立天文台報
9
2-28 (2006) p13 4-1回折における光度変化,
p14 図14,
および p18
図18
をご覧ください。
数式はともかくとして...
Limovieでの操作は簡単です。
回折シミュレーション機能の使い方
(1)
グラフの横軸のスケールを4から8にしておくことをお勧めします。
(2)
グラフ上の、現象時刻付近の点をクリックし、選択された状態(赤色)にしておきます。
#
このとき、25%のところではなく、その前後の、光量がゼロ付近になった位置を選択しておく方がよい結果が得られます。
(3)
グラフ表示ウインドウの中の Diffraction
ボタンをクリックします。
#
Fresnel Diffraction の操作ウインドウが現れます。
(4)
月までの距離(km)
と、月の影の速度(m/sec)
を入力します。(単位に注意してください。)
Fresnel
Diffraction
ウインドウの最上部のエディットエリアをクリックし、キーボードから入力してください。
これらの数値は、予報ソフトLOWおよびIOTA予報、またはOCCULTを使って次のように得ることができます。
LOWを起動します。
【月までの距離】
Prediction
で予報を計算した後、View
- Moon & Star/Planet で、月と恒星の位置関係を示した図が表示されます。
月の距離は
Distance
Moon
の数値を用います。
【月の影の速度(方法1)】
接食の場合で、IOTA予報を用いることができる場合には、次のようにします。
[月縁図]の下に、LUNAR
VELOCITY: x.xxx DEG. OF POSITION ANGLE/MIN.
のように書かれています。
これは、月縁の1周を360度としたとき、1分間に月が何度動くか、を表しています。そこで、この数値を
VPAと表すと
月の影の速度(m/sec)
= 月の半径(1738000m)
* π * VPA / (180 * 60)
で求められます。
*この方法は、せんだい宇宙館の早水勉氏からご教示いただきました。
【月の影の速度(方法2)】
OCCULTを起動します。
RV(radial
velocity) と Ctt(ContactAngle)
の数値を使って、
LV
= MS * LD * π * 1000 / ( 180 * 3600 * cos(Ctt) )
LV
: 月の影の速度 RV
: radial velocityの数値 Ctt
: contact angleの数値 LD
: 月の距離
として計算できます。
月の影の速度は、ほぼ
500m/sec
から 1000m/sec
の範囲で求められるはずです。
注意:グレージングの場合は、グレージングそのものの画面から読み取った数値だと計算精度が低くなりますので、その直前直後の通常の星食の場合について計算するようにしてください。
訂正:LVを求める式のうち
cos
とするところを sin
と記述してありました。上記のように訂正いたします。
また、cotact
angle
については、LOWとOCCULTでかなり差があります。いくつか計算したところ、OCCULTの数値を使用したほうが安定した結果が出るようですので、上記のようにしてみました。
(5) Processing を、for Grazing (Obtain Time and Angle) にセットします。
この機能が必要となるのは、たいていグレージングの場合だと思われます。一般の星食についての活用は、現在検討中です。
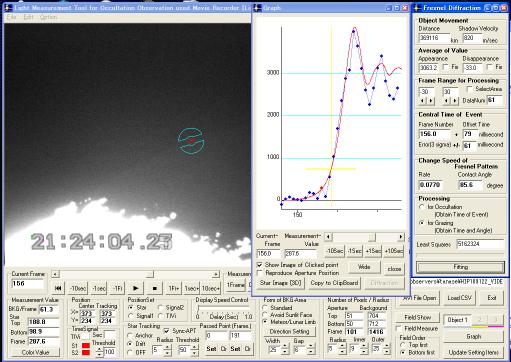
(6) Fittingボタンをクリックします。
しばらくすると、光量変化に最も合うと考えられるシミュレーションカーブが現れます。
表示された黄色い縦線は、推定される現象中央時刻を示しています。
Central
Time of Event の中の数字は、
Frame
Number : 選択された赤い点が、何番目のフレームかを示します。
#
画面のインポーザの表示を見て、フレームの時刻を読み取ります。
Offset
Time : 選択された(赤い点の)フレームから、推定された現象時刻が何ミリ秒ずれているかを示します。
#
Offset Timeの数値が+のときは上記フレーム時刻に加算。−の時は減算してください。
#
TIViの場合は、小数点以下2桁の表示ですので、Offset
Timeを2桁に丸めて計算してください。
#
誤差はシミュレーションと各フレーム光量の値との差から計算で求められたものです。+/-3σを表示します。真の時刻がこの中に分布する確率が99.7%ということになります。
(7) 推定の精度を高める
#
リリース候補のフィッティング機能は充分でなく、以下のような制限がありました。
#
正式バージョンでは改善されていますので、以下について考慮の必要はありません。
<削除予定
--
ここから
--
計算速度などプログラミングにおける様々な事情から、Limovieの持つフィッティングには、最初に選択したフレームの位置によって推定値が異なる、という現象があります。
そこで、ご不便をおかけしますが、次のようにして、推定精度を高めてください。
Fresnel
Diffractionウインドウの最下部にある、Least
Squares
に表示される数字をメモしておきます。これは、2乗誤差の合計を表しています。
次に、測定したグラフ上の点の前後の数点について、同様にフィッティングを行います。その中で、Least
Squares の数値が最も低い場合が、最も精度のよい推定、ということになります。
*
-- ここまで --
削除予定>
3.月の形状の推定
Change
Speed of Fresnel Pattern に示された Contact
Angle
の値は、月の進行方向と垂直な方向に対する月縁の方向のなす角です。これをもとに、月縁の地形(傾き)を推定することができます。
詳しくは、国立天文台報
9
2-28 (2006) p18、およびp19
図20をご覧ください。
4.CSVファイルの読み込み
保存してあるCSVファイルからグラフを表示させるために作成した機能です。
CSVファイルに記録されたファイル名(パス)を読んで、AVIファイルも同時に読み込みますので再解析に便利です。
また、Exelなどを使って移動平均やメディアンフィルター処理を行い、Limovieから再度読み込むと、それらの結果をグラフに表示することができます。
5.AVISynth の利用
Avisynth
self-extracting archive (*.exe file) をパソコンにインストールすると、AVI
Type1のファイルも読めるようになります。
これまでLimovieは、AVI
Type2のファイルしか読むことができず、そのため、キャプチャの仕方に工夫が要り、最長4分40秒という制限もありました。
AVISynthを用いることにより、これらの点を解決することができます。
この手法は、Steve
Preston氏が発見しました。また、氏は、更に進んで、ソフトウエア上でゲインを上げたり、移動平均をしたりする方法についても紹介しています。詳しくは下記をご覧ください。
Using
Avisynth with LiMovie
LimovieからAVISynthを利用するには、
(1)
AVISynthをインストールする
#
これまで使用していたコーデックはアンインストールしておいたほうがよいと思います。
(2)
Update Setting Items ボタンをクリック。
(3)
Use AviSynth にチェック。
(4)
Update .INI file
ボタンを押す。
こうすることにより、AVISynthの動作に必要な.AVSファイルが自動生成され、通常のコーデックを用いているのと同じ感覚でAVIファイルの解析を行うことができます。
6.複数の対象の同時測光
減光量のわずかな食現象が確かであるかを判断したり、うす雲の影響を除いたりするためには、複数の恒星について測定をおこない、比較することが有効です。
従来Limovieは、一つの恒星しか測れなかったために、測定作業を複数回おこない、結果は表計算ソフト上でそれらを貼り付けて解析する。という方法に頼らざるを得ませんでした。
このバージョンでは、画像領域でマウスの右ボタンをクリックすることにより、対象星を3個まで増やすことができます。
グラフも合わせてまたは個別に表示されます。